
I/O处理
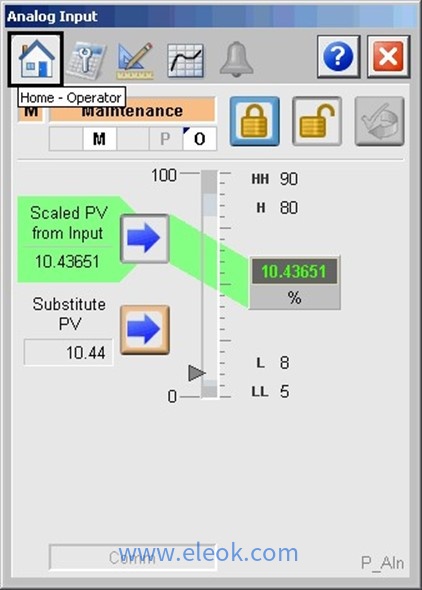
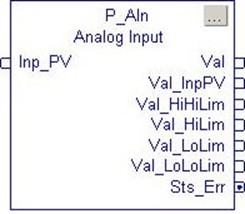
★基本模拟量输入(P_AIn)
P_AIn指令监视一个模拟值(该值通常来自模拟量输入模块的某个通道),并在模拟值超出用户指定的阈值(上限和下限)时提供报警。
该指令还给出了将模拟量输入值从原(输入)单位转换为工程(输出)单位的线性标度,并输入一个替代过程变量。
单击该链接访问参考手册:SYSLIB-RM001.PDF

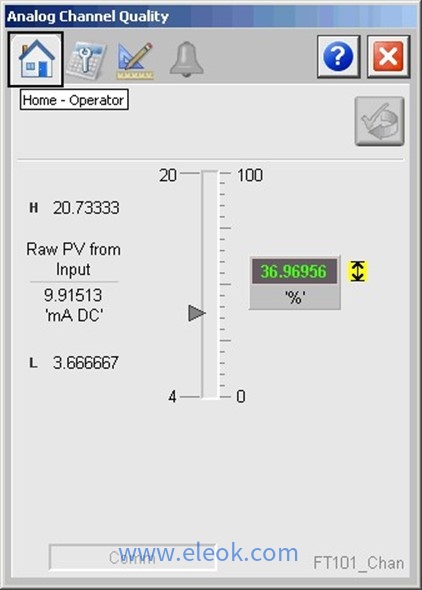
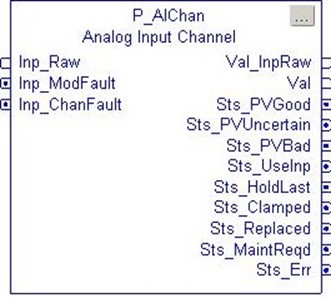
模拟量输入通道(P_AIChan)
P_AIChan指令监视一个模拟量输入通道,并提供一个可配置的故障报警。
该指令通常与其他指令关联。
P_AIChan操作面板从其他操作面板调用,例如,关联的模拟量输入指令操作面板、P_PIDE和计量操作面板。
单击该链接访问参考手册:SYSLIB-RM042.PDF
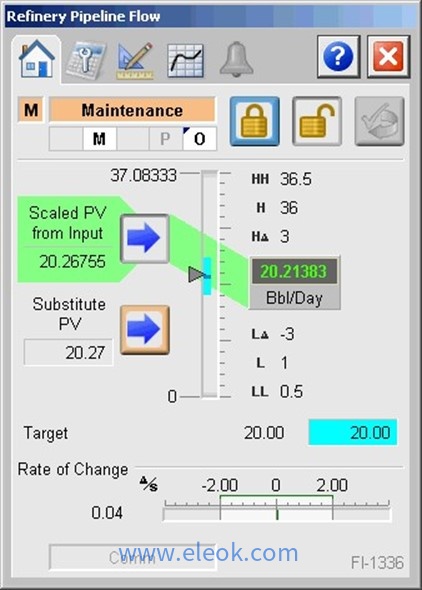
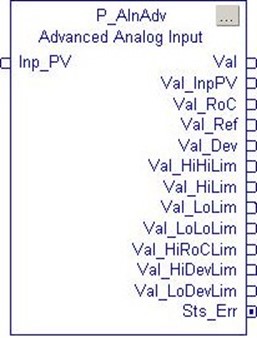
高级模拟量输入(P_AInAdv)
P_AInAdv指令监视一个模拟值,该值通常来自模拟量输入I/O模块。该指令具有基本模拟量输入不包含的以下高级功能:
•使用平方根标度(Squarerootscaling)提供正或负流量值
•计算PV变化率和可配置的高变化率报警
•偏离参考值报警
单击该链接访问参考手册:SYSLIB-RM018.PDF

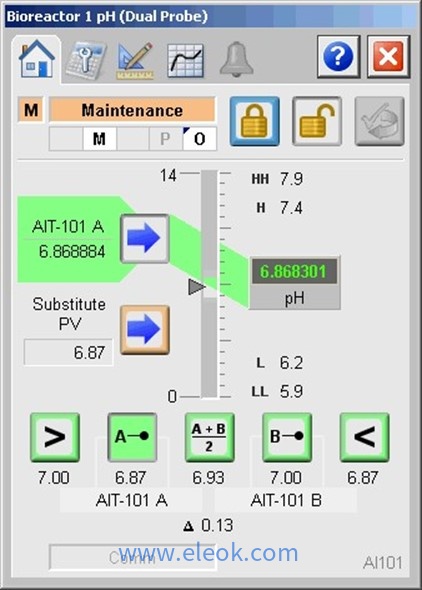
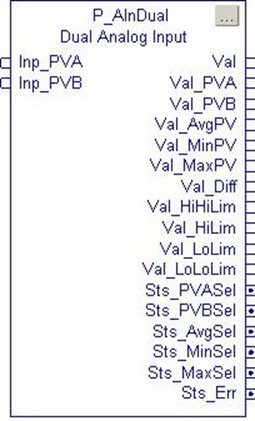
★双传感器模拟量输入(P_AInDual)
P_AInDual指令通过两个模拟量输入信号(双传感器、双变送器、双输入通道)监视一个模拟过程变量(PV)。
该指令具有基本模拟量输入不包含的以下高级功能:
•双输入
•当两个输入PV之间的差值超过配置的限值时发出报警
单击该链接访问参考手册:SYSLIB-RM019.PDF

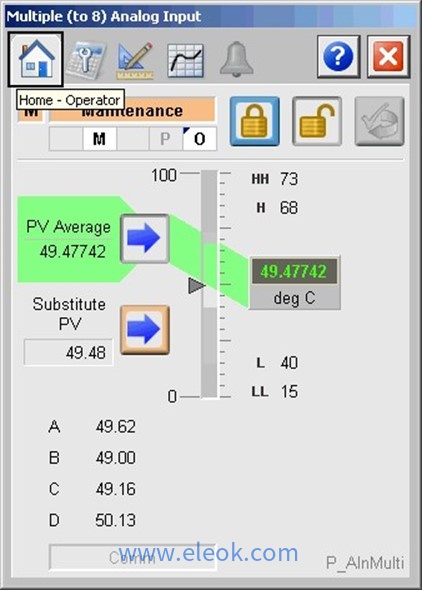
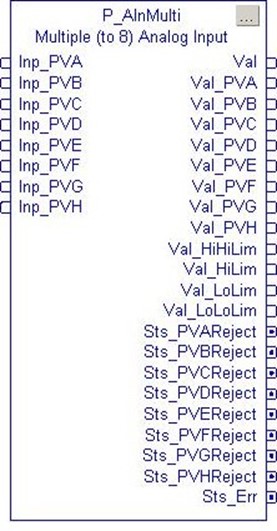
多模拟量输入(P_AInMulti)
P_AInMulti指令通过多达八个模拟量输入信号(传感器、变送器、输入通道)监视一个模拟过程变量(PV)。如果您希望通过计算多次测量的平均值显示温度或其他过程变量,则使用该指令。
单击该链接访问参考手册:SYSLIB-RM026.PDF

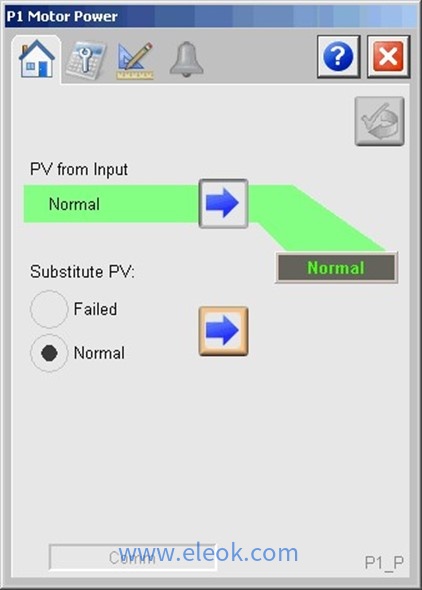
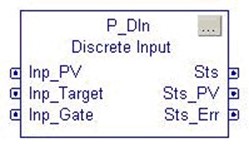
离散量输入对象(P_DIn)
P_DIn指令用于接收和处理单个离散条件,该条件通常用于离散量输入卡的一个通道。它可与任何离散(BOOL)信号一起使用。您可使用该指令显示过程温度、液位、流量、距离、压力或其他开关的状态。
单击该链接访问参考手册:SYSLIB-RM003.PDF

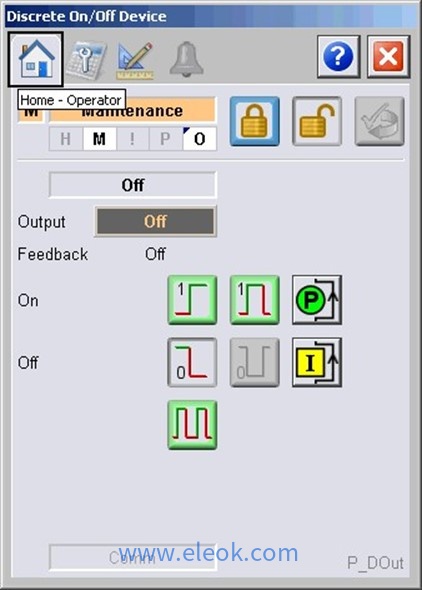
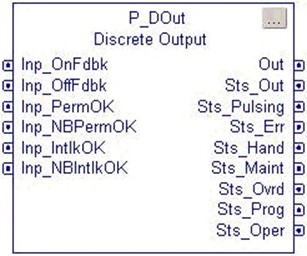
离散量输出(P_DOut)
P_DOut指令通过一个离散量输出信号控制设备,并监视来自该设备的反馈来检查设备是否发生故障。
该指令在各种模式下工作,并可提供稳定的单脉冲或连续脉冲输出。P_DOut指令是需要闪烁的指示灯或塔灯(stacklights)的理想选择。
单击该链接访问参考手册:SYSLIB-RM029.PDF
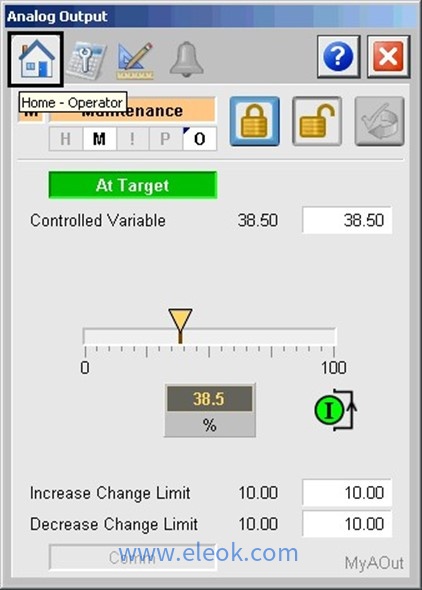
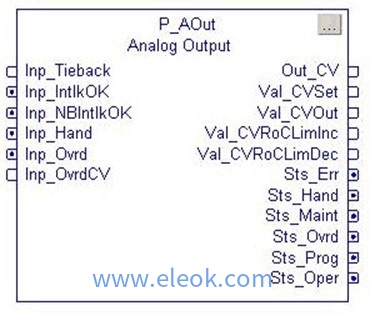
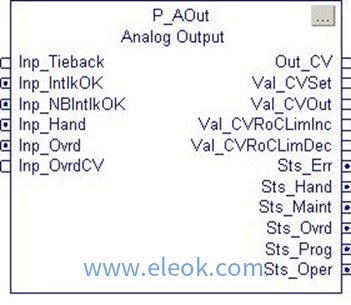
模拟量输出(P_AOut)
P_AOut指令用于操纵一个模拟量输出来控制现场设备,例如,控制阀或电动门定位器。输出对被控变量(CV)信号的操作员(手动)或程序设置作出响应。
P_AOut指令控制各种模式下的模拟量输出,监视故障条件。
单击该链接访问参考手册:SYSLIB-RM011.PDF
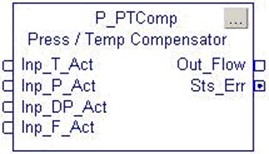
★压力/温度补偿流量(P_PTComp)
根据给定的体积流量或差压测量值,P_PTComp指令用于计算在标准温度和压力下的流量(从本质上说是质量流量)。该指令还需要流动气体的实际温度和压力的测量值。
单击该链接访问参考手册:SYSLIB-RM032.PDF
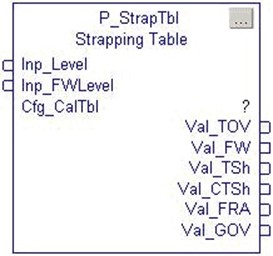
★储罐计量表(P_StrapTbl)
根据给定的产品液位和储罐校准表,P_StrapTbl指令计算立式圆柱形储罐内(uprightcylindricaltank)的产品体积。该指令可补偿储罐底部的流动水(根据给定的产品/水界面高度)或罐壳的热膨胀(根据给定的外壳材料和产品线性膨胀系数和环境温度)。
单击该链接访问参考手册:SYSLIB-RM033.PDF
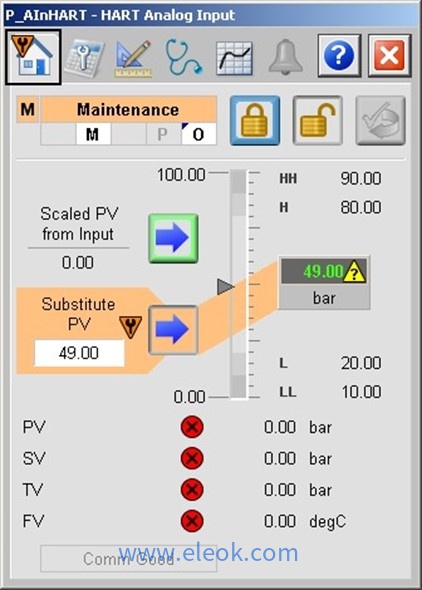
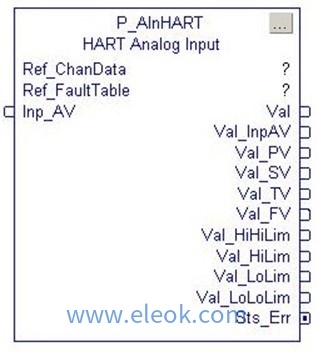
HART模拟量输入(P_AInHART)
P_AInHART用户自定义指令监视来自流量、液位、压力、温度或其他HART连接模拟量传感器的一个模拟量输入。当模拟值超出用户指定的阈值(上限和下限)时提供报警。该指令还可将模拟量输入值从原(输入)单位转换为工程(输出)单位的线性标度,并输入一个替代过程变量(PV),用于处理一个超限或故障输入。
单击该链接访问参考手册:PROCES-RM010.PDF
HART模拟量输出(P_AOutHART)
P_AOutHART用户自定义指令用于操纵一个模拟量输出来控制现场设备,例如,控制阀或电动门定位器。输出对被控变量(CV)信号的操作员(手动)或程序设置作出响应。
单击该链接访问参考手册:PROCES-RM010.PDF


回路调节控制
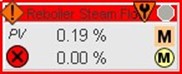
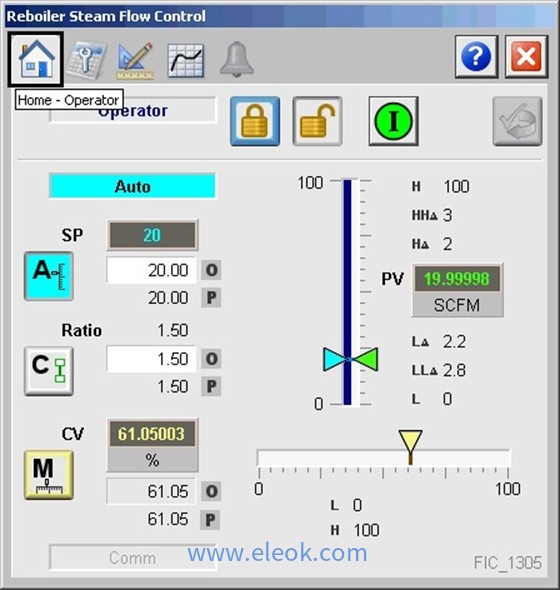
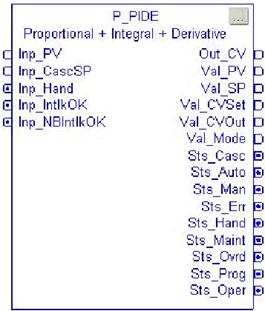
★增强型PID(P_PIDE)
P_PIDE指令提供PID回路控制的PIDE内置指令功能及附加报警状态信息,包括限值和严重级别。当您计划对回路控制使用PIDE,并为操作员实现可视化时使用此指令。
单击该链接访问参考手册:SYSLIB-RM045.PDF
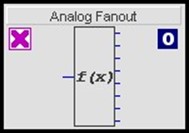
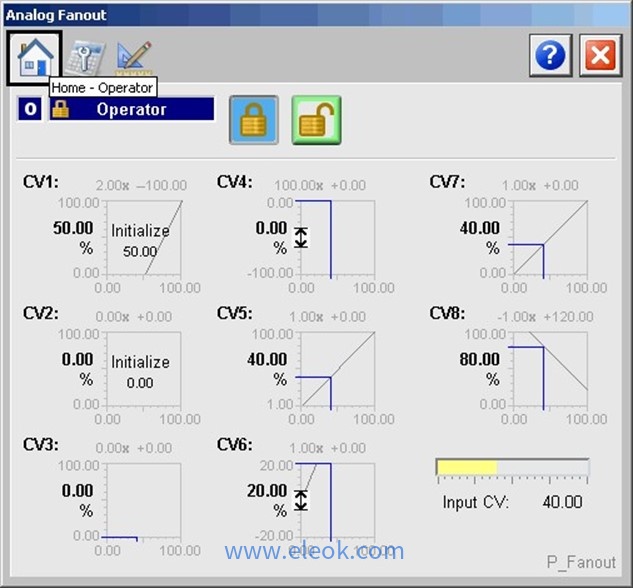
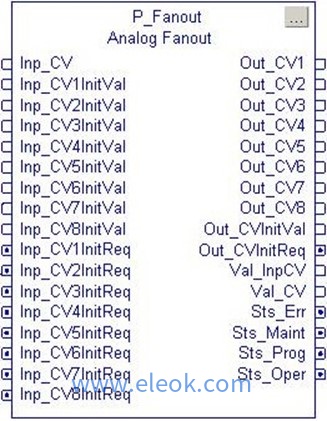
★模拟量扇型输出(P_Fanout)
P_Fanout指令将一个”主”模拟量输出信号处理成多个”辅”用户或设备使用。每个辅输出都具有可配置的增益和偏移量。
该指令将最小和最大箝位限值应用于每个输出(辅)CV。
单击该链接访问参考手册:SYSLIB-RM030.PDF
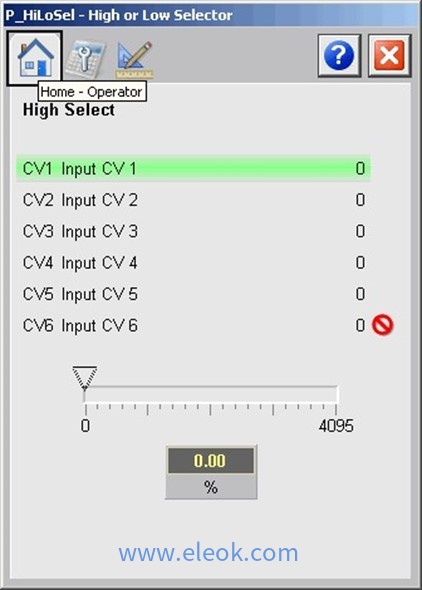
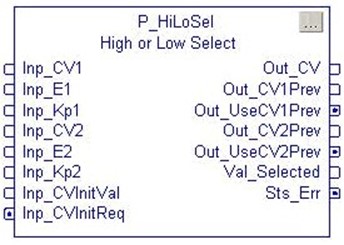
上限或下限选择器(P_HiLoSel)
P_HiLoSel指令选择输入CV(最多6个)的最小值或输入CV的最大值,并输出该值。标记未选中的CV以跟踪选定的CV。可选择对跟踪值进行偏移,偏移量等于上游PID/PIDE的增益乘以误差,以避免不断减小(若为下限选择)或不断增加(若为上限选择)输出的问题。
单击该链接访问参考手册:SYSLIB-RM047.PDF
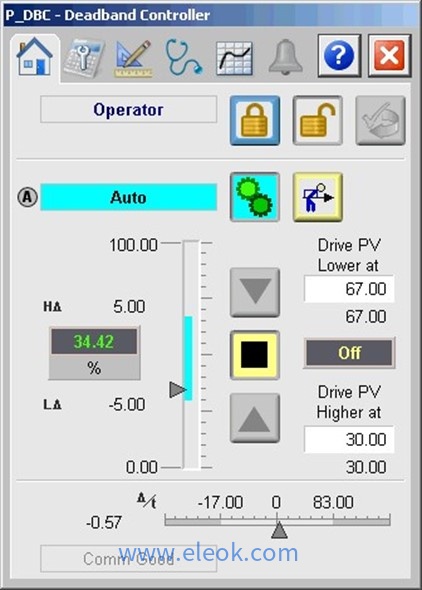
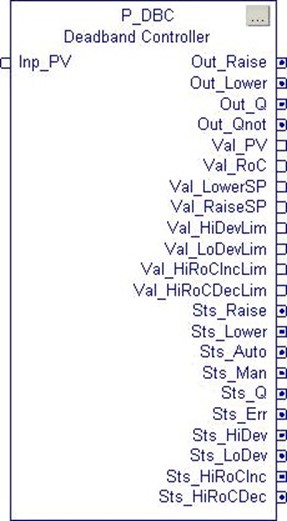
死区控制器(P_DBC)
P_DBC(死区控制器)用户自定义指令实现了一个死区(开/关或Bang-Bang)控制器。
死区控制器使用变频器PV下限和变频器PV上限设定值来保持这些设定值之间的输入PV。
当PV达到变频器PV下限设定值时,关闭到下游设备的输出。
当PV达到变频器PV上限设定值时,接通到下游设备的输出。它具有自动和手动回路模式。
单击该链接访问参考手册:SYSLIB-RM055.PDF
工序控制
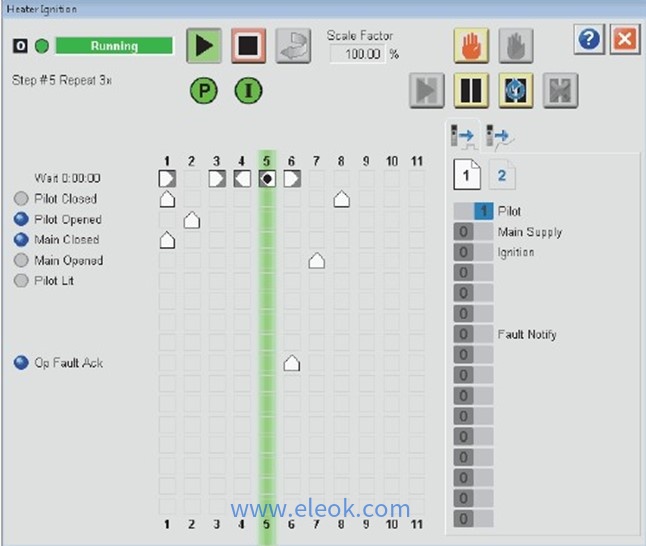
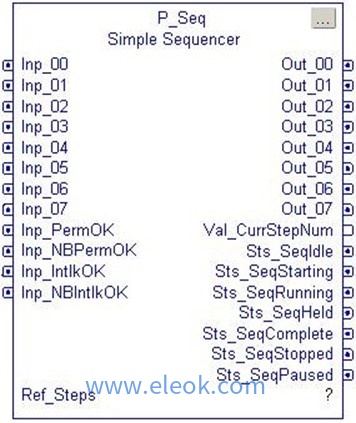
★Sequencer对象(P_Seq)
P_Seq指令是基于控制器的步序解决方案,可通过自动执行通用操作步骤缩短工程时间。使用逐步配置方式,您可轻松地从HMI显示画面直接调整步骤。
单击该链接访问参考手册:PROCES-RM006.PDF

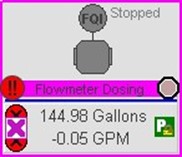
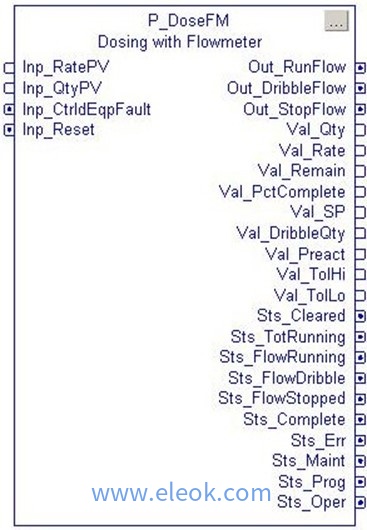
★流量累积计量(P_DoseFM)
P_DoseFM指令控制原料添加,通过流量计测量所添加原料的剂量。可使用以下任何一种流量计:
•模拟量流量计(信号与流量成正比)
•脉冲发生流量计(脉冲数与输送量成正比)
•数字流量计提供流速或数量(总流量)信息。
单击该链接访问参考手册:SYSLIB-RM020.PDF

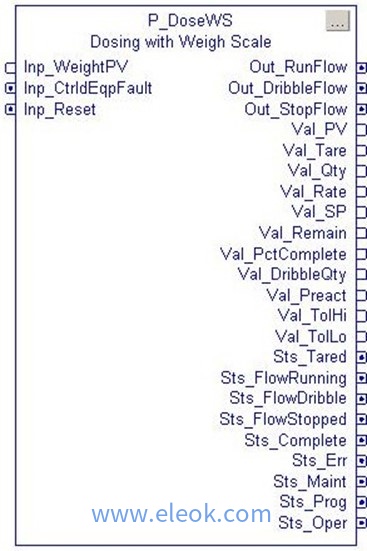
★称重累积计量(P_DoseWS)
P_DoseWS指令控制原料添加,通过称重测量所添加原料的剂量。电子秤可设置在接收容器(重量增加)或发送容器(重量下降)中。电子秤可通过一个模拟量输入、设备网络或其他连接进行连接。
单击该链接访问参考手册:SYSLIB-RM021.PDF


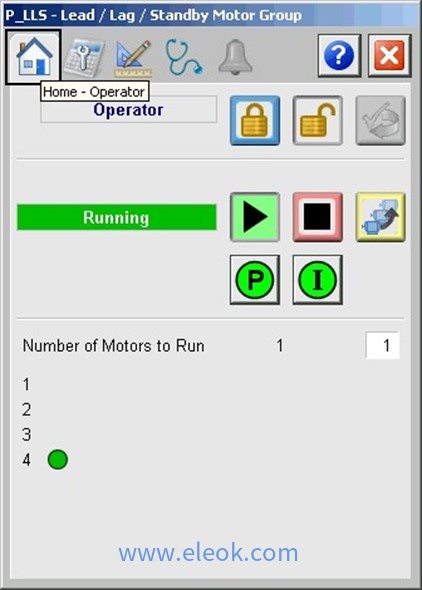
超前/滞后/备用电机组(P_LLS)
P_LLS(超前/滞后/备用电机组Lead/Lag/Standby)控制和监视一组电机(2-30台)。可设置组中的电机数量、电机启动的顺序以及启动和停止之间的时间。
如果没有足够数量的电机启动或停止,将生成报警。
单击该链接访问参考手册:SYSLIB-RM054.PDF


电机
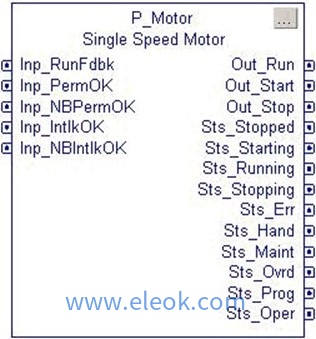
★单速电机(P_Motor)
P_Motor指令控制各种模式下的非可逆单速电机,并监视故障条件。
该电机可使用全电压启动器(FVNR)、软启动器或其他电机保护设备。
该指令还提供运行反馈和实际电机状态的显示。
单击该链接访问参考手册:SYSLIB-RM006.PDF

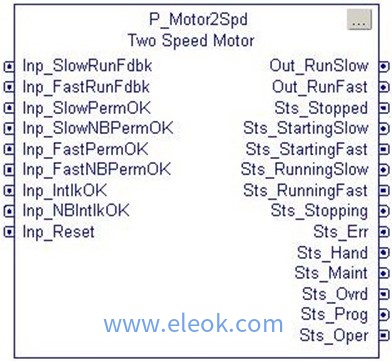
★双速电机(P_Motor2Spd)
P_Motor2Spd指令控制各种模式下的非正反转双速电机(快速/慢速/停止),并监视故障条件。
可为电机选择运行反馈,若该选项可用,则可用于确认电机是否以给定速度运转;若没有,则发出报警。
单击该链接访问参考手册:SYSLIB-RM012.PDF


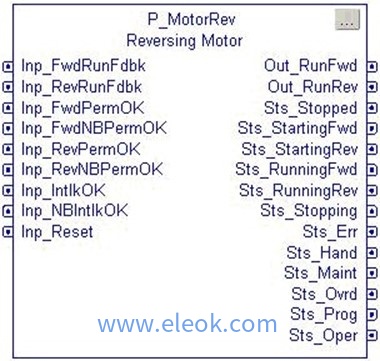
★正反转电机(P_MotorRev)
P_MotorRev指令控制各种模式下的可逆电机(FVR,正向/反向/停止电机),并监视故障条件。
该指令可选择执行运行反馈,若该选项可用,则可用于确认电机是否以给定方向运转,若没有,则发出报警。
单击该链接访问参考手册:SYSLIB-RM013.PDF


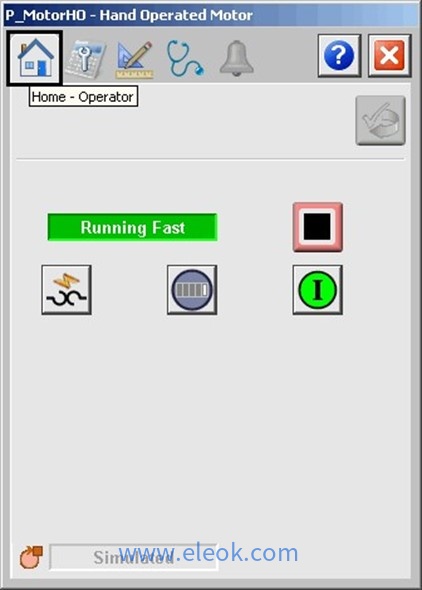
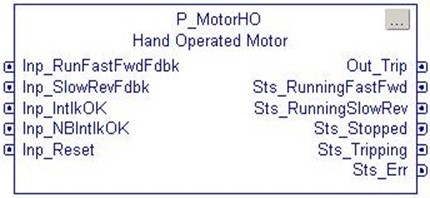
手动操作电机(P_MotorHO)
P_MotorHO指令监视本地控制(手动操作)的电机。
P_MotorHO指令支持单速电机、双速电机和正反转电机。该指令还支持可选的跳闸功能和输出,用于停止电机。
单击该链接访问参考手册:SYSLIB-RM022.PDF

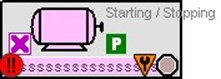
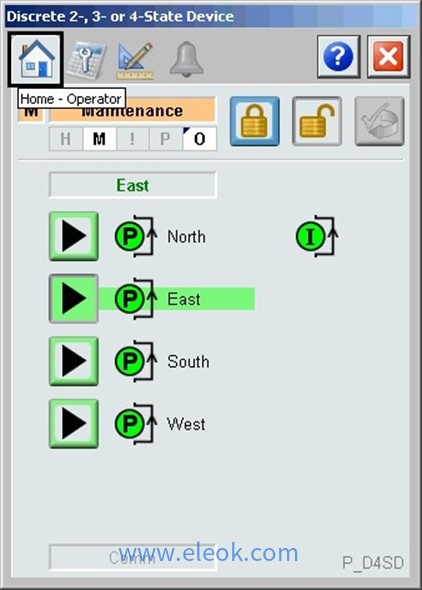
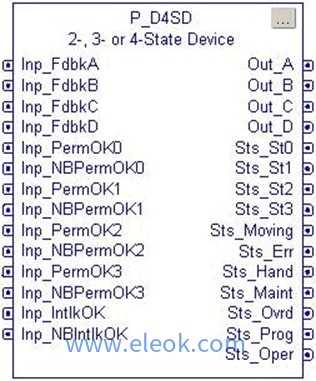
离散型2、3或4态设备(P_D4SD)
P_D4SD指令控制和监视来自一个离散型2态、3态或4态设备的反馈,包括一个多速电机或多位置阀。该指令控制多达4个离散量输出(在各种设备状态下每个输出的状态均可配置),并监视多达4个离散反馈输入。
单击该链接访问参考手册:SYSLIB-RM028.PDF
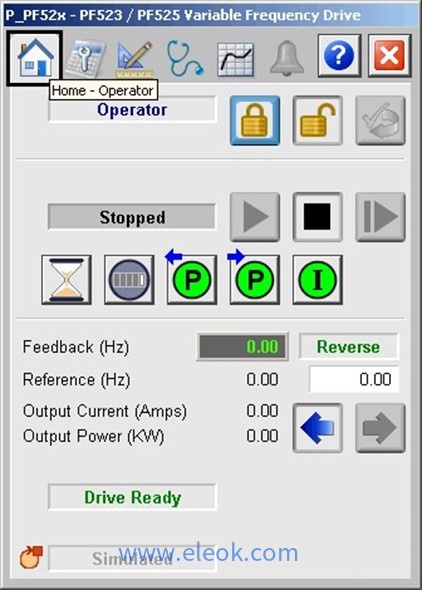
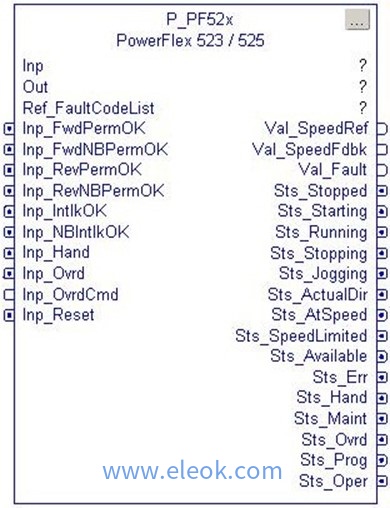
PowerFlex523/525变频器(P_PF52x)
P_PF52x指令用于控制和监视PowerFlex523或PowerFlex525变频器。
该指令通过EtherNet/IP接口上配置的数据链接收集并显示来自变频器的诊断信息。该指令还提供以下功能:
•启动、停止、点动变频器,并设置速度基准值和方向。
•监视运行反馈并显示实际变频器状态。
单击该链接访问参考手册:SYSLIB-RM048.PDF

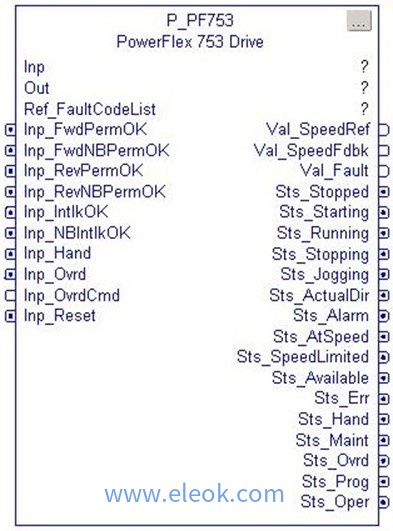
PowerFlex753变频器(P_PF753)
P_PF753指令在各种模式下使用变频器(交流变频)以操作一个变速电机,并监视故障条件。
该指令配合PowerFlex753变频器和20-COMM-E以太网通信模块使用。该指令显示变频器信息,包括故障、报警和一般状态。
单击该链接访问参考手册:SYSLIB-RM044.PDF


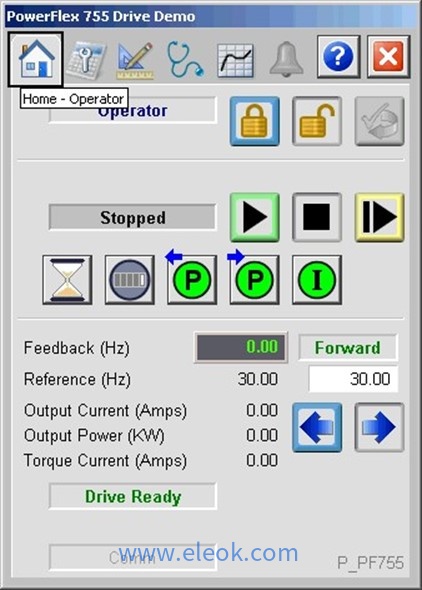
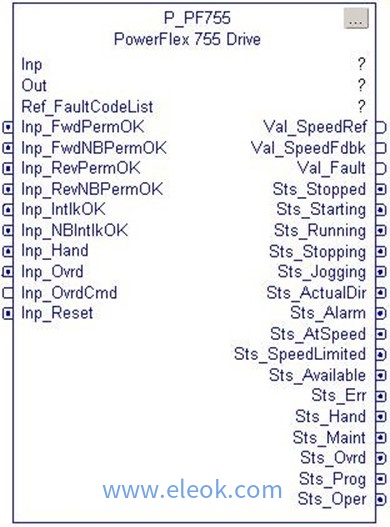
PowerFlex755变频器(P_PF755)
P_PF755指令在各种模式下使用变频器(交流变频或直流)操作一个变速电机,并监视故障条件。
该指令配合在EtherNet/IP网络中与控制器通信的PowerFlex755交流变频器使用。该指令还可用于带有增强型以太网卡的PowerFlex753变频器。
单击该链接访问参考手册:SYSLIB-RM040.PDF

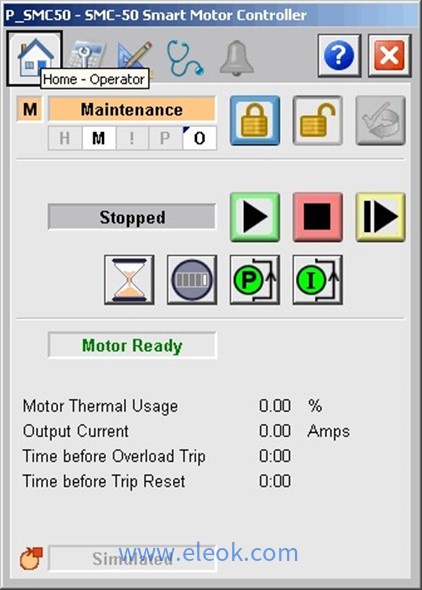
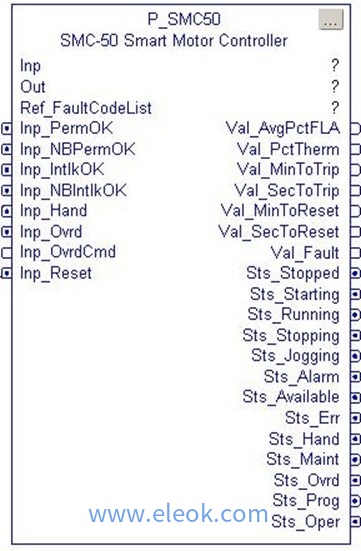
SMC™-50智能电机控制器(P_SMC50)
P_SMC50指令通过SMC-50智能电机控制器(软启动器)控制和监视电机。
该指令与电机控制器通信,以启动、停止和点动电机。该指令还监视电机的状态,检测电机是否无法启动或停止,并显示电机运行时信息。运行时数据包括功率、功率因数、电机热利用率和电机控制器故障代码。
单击该链接访问参考手册:SYSLIB-RM052.PDF

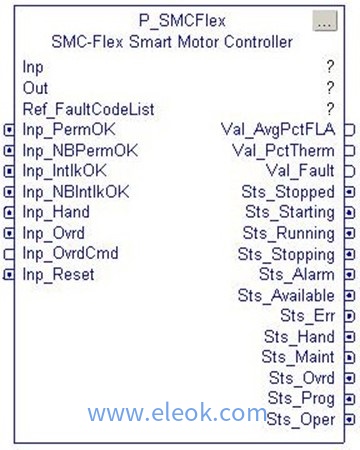
SMC™Flex智能电机控制器(P_SMCFlex)
P_SMCFlex指令通过SMCFlex系列智能电机控制器(软启动器)控制电机。
该指令与电机控制器通信,以启动和停止电机。该指令还监视电机的状态,检测电机是否无法启动或停止,并显示电机运行时信息。运行时数据包括相电流、电机功率和功率因数以及电机控制器故障代码。
单击该链接访问参考手册:SYSLIB-RM053.PDF


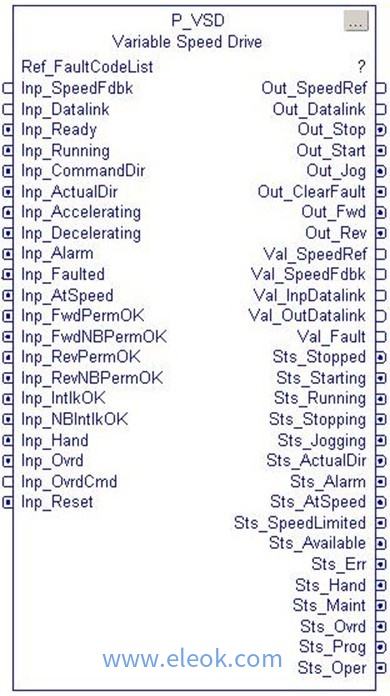
★变速驱动器(P_VSD)
P_VSD指令使用变频器(交流变频或直流)操作一个变速电机。该指令可用于所有现有Allen-Bradley®变频器及诸多旧款型号,包括:
•Bulletin1336
•Bulletin1395
•PowerFlex4/40/70/700/7000
•PowerFlex直流变频器
单击该链接访问参考手册:SYSLIB-RM016.PDF

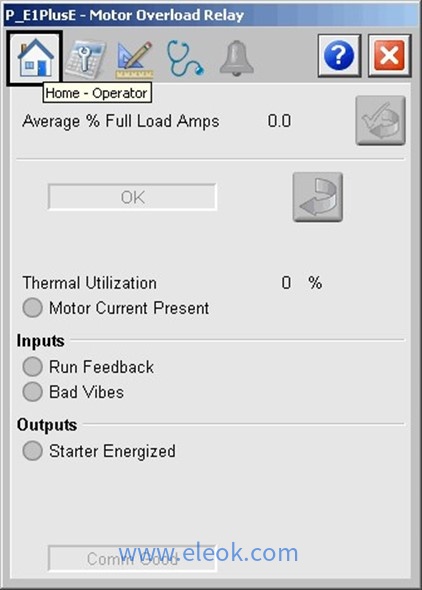
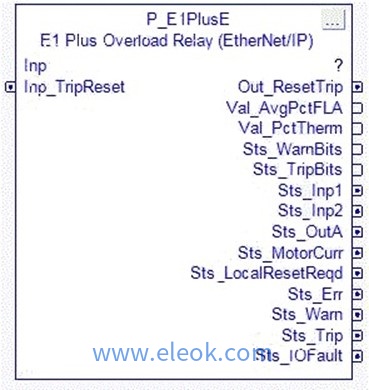
E1Plus™电子过载继电器(P_E1PlusE)
P_E1Plus(EtherNet/IP)指令通过193-ETNEtherNet/IP接口控制和监视E1Plus过载继电器。
该指令监视过载继电器的警告和跳闸条件,并以满载电流百分比(%FLA)和电机热利用率百分比(%MTU)形式显示电机电流。列表中包括前五次过载跳闸的原因。该指令还提供了有限的过载跳闸远程复位功能。
单击该链接访问参考手册:SYSLIB-RM049.PDF
![]()
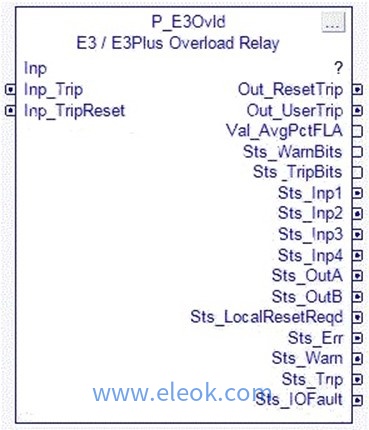
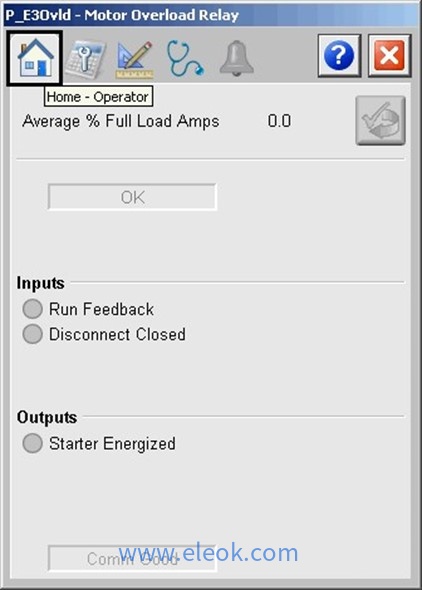
E3™/E3Plus™过载继电器(P_E3Ovld)
P_E3Ovld指令控制和监视以下过载继电器:
•193/592-EC1
•193/592-EC2
•193/592-EC3
•193/592-EC5
该指令使用内置的DeviceNet接口或2100-ENETEtherNet/IP接口监视继电器。该指令报告警告和跳闸条件,以满载电流百分比形式(%FLA)显示电机电流,并提供命令以触发远程跳闸和远程跳闸复位。
单击该链接访问参考手册:SYSLIB-RM050.PDF
![]()
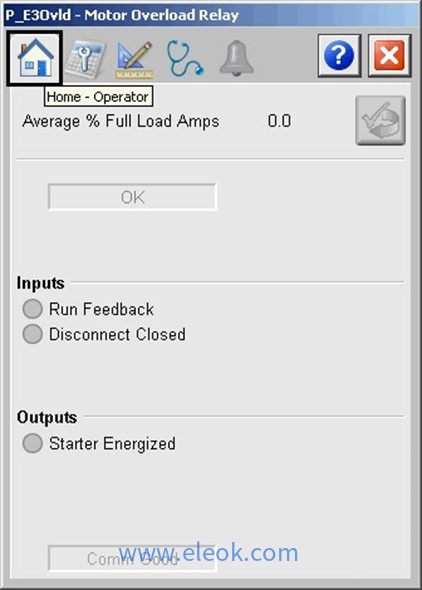
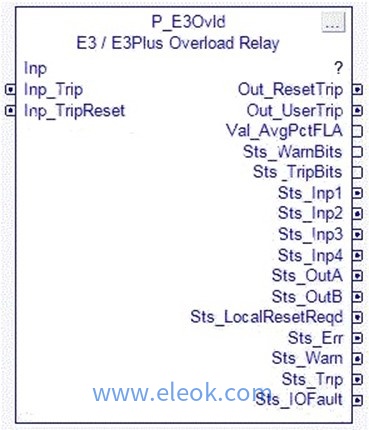
E300™过载继电器(P_E300Ovld)
P_E300Ovld指令通过其内置的EtherNet/IP接口控制和监视193-ECM-ETR过载继电器。
该指令报告警告和跳闸条件,显示电机平均电流和相电流,并提供命令以触发远程跳闸和远程跳闸复位。该指令还支持过载继电器的用户自定义选项,包括其操作员接口以及可选的离散量I/O和模拟量I/O模块。
单击该链接访问参考手册:SYSLIB-RM051.PDF
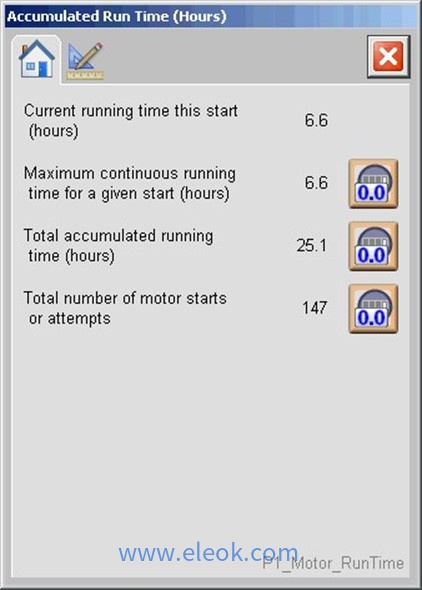
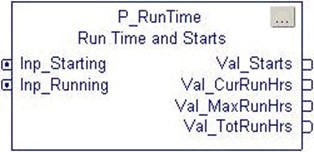
★运行时间和启动计数器(P_RunTime)
P_RunTime指令用于累加总运行时间,统计电机或其他设备的启动次数。它是机械计时表的一种软件实现形式,通常安装在电机控制中心(MCC)的门上,以显示总电机运行时间。运行时间和启动次数是用于维护任务的变量。
单击该链接访问参考手册:SYSLIB-RM010.PDF

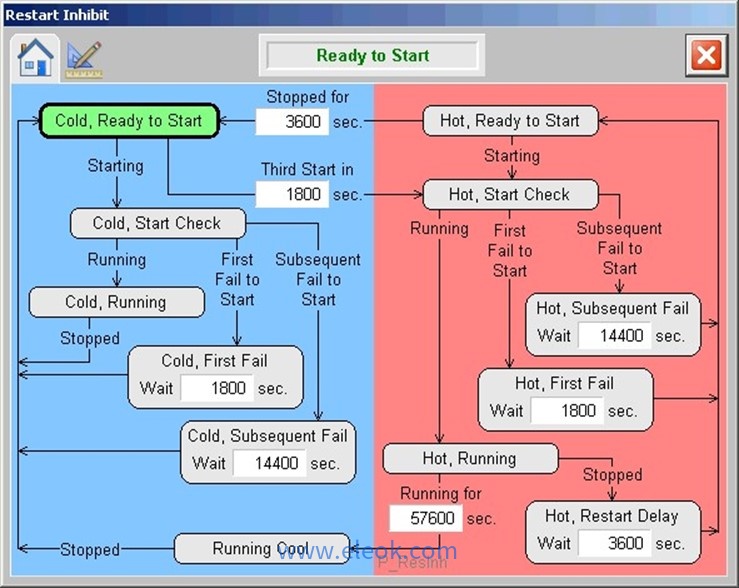
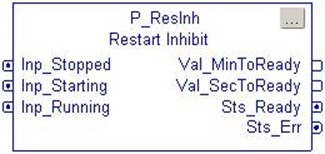
大型电机重启禁止(P_ResInh)
P_ResInh指令用于防止大型电机因重复启动而损坏。该指令提供一个基于规则的重启状态模型,它不用于模型化或监视电机发热。
单击该链接访问参考手册:SYSLIB-RM009.PDF

阀
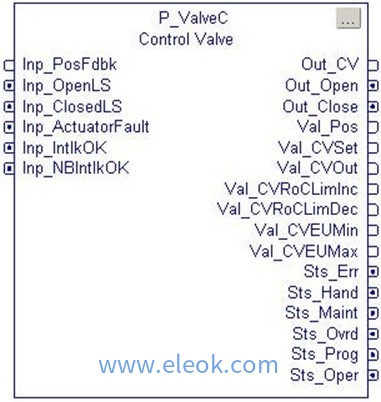
★模拟量/脉冲控制阀(P_ValveC)
P_ValveC指令通过一个模拟量信号或离散信号操纵控制阀。
阀需要目标位置的模拟量输出(或通过网络传送模拟值),或者需要一对离散量输出(或通过网络传送离散信号)来告知何时将阀移至全闭和全开。
单击该链接访问参考手册:SYSLIB-RM034.PDF


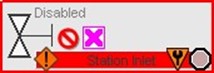
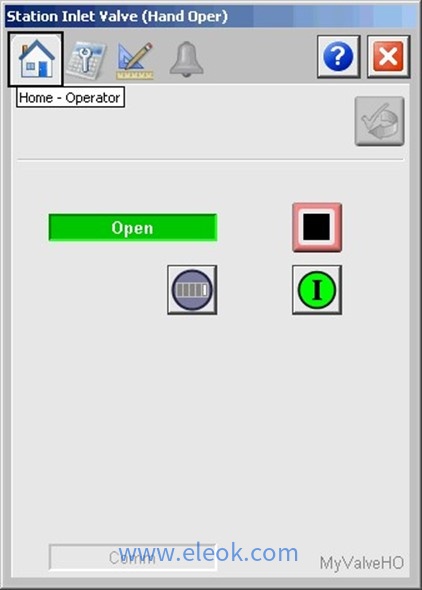
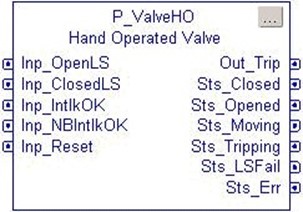
手动阀(P_ValveHO)
P_ValveHO指令监视手动(本地)阀,并显示其当前状态。
阀可采用电磁操作、电机操作或手动操作。P_ValveHO指令不能完全控制阀,但它可选择在跳闸电路中包含一个输出,使阀跳闸到默认(故障)状态。
单击该链接访问参考手册:SYSLIB-RM025.PDF
★电动阀(P_ValveMO)
P_ValveMO指令用于在各种模式下操作(打开和关闭)电动阀,监视故障条件。
该阀可提供(非强制要求)行程末端的限位开关反馈。阀可选择使用一个输出来触发”阀停止”功能,例如,打破阀操作器上的密封电路停止行进或切换行进方向。
单击该链接访问参考手册:SYSLIB-RM014.PDF



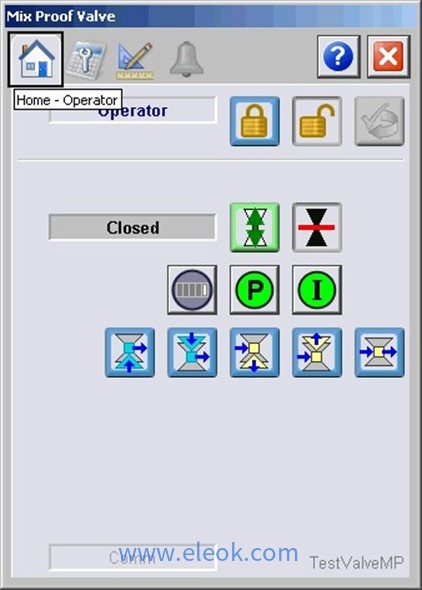
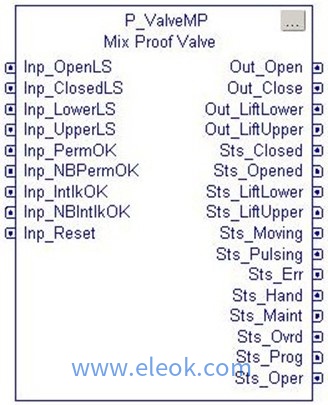
防混阀(P_ValveMP)
P_ValveMP指令控制各种模式和状态下的防混阀,并可以验证该阀是否到达给定位置。当未到达目标位置时,可提供报警。该指令支持防混阀使用或不使用用于清洁(CIP,原位清洁)或蒸汽处理(SIP,原位消毒)的附加连接。
单击该链接访问参考手册:SYSLIB-RM035.PDF

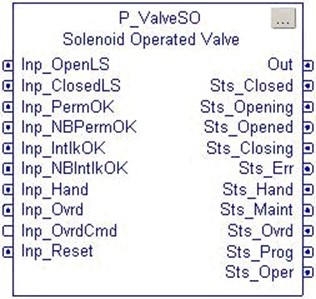
★电磁操作阀(P_ValveSO)
P_ValveSO指令用于在各种模式下操作(打开和关闭)单个电磁操作阀,并监视故障条件。
使用该指令来操作单电磁式弹簧复位阀,可采取激励开启(因故障关闭)或激励关闭(因故障开启)模式。该阀可提供(非强制要求)行程单端或两端的限位开关反馈。
单击该链接访问参考手册:SYSLIB-RM015.PDF


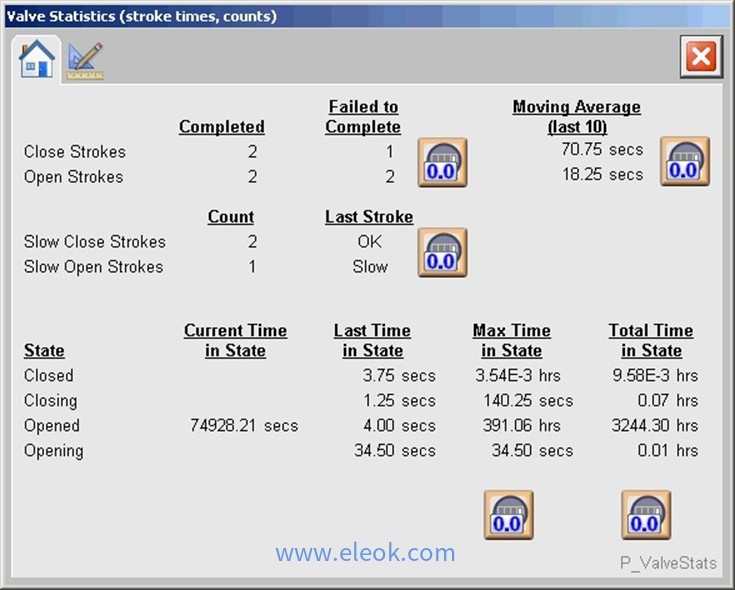
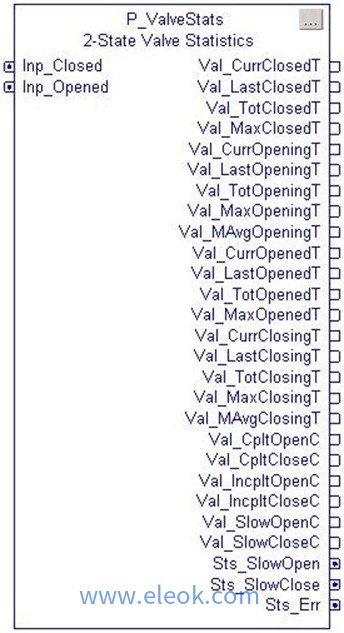
★阀门统计数据(P_ValveStats)
P_ValveStats指令监视2态(打开和关闭)阀,并记录与冲程时间和冲程次数相关的各种统计数据。
该指令配合P_ValveSO、P_ValveMO和P_ValveHO指令使用,也可配合P_ValveMP指令使用。
单击该链接访问参考手册:SYSLIB-RM036.PDF
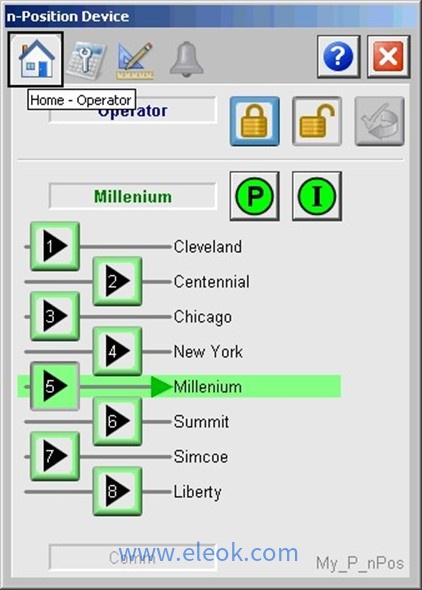
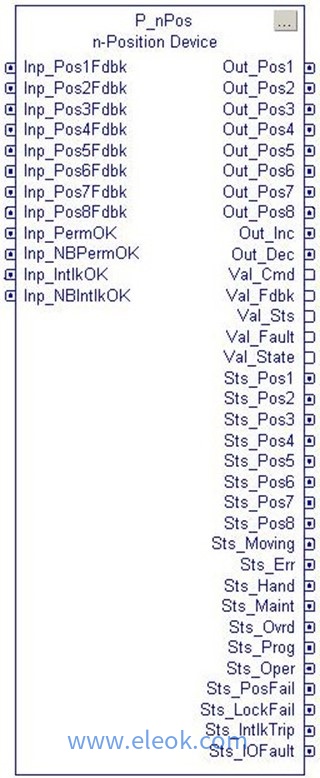
n-Position设备(P_nPos)
P_nPos指令控制带有2…8个位置的圆形或线性离散设备。
该指令提供输出来选择一个单独的位置,并朝增多位置的方向(对圆形设备而言为”顺时针”)或减少位置的方向(对圆形设备而言为”逆时针”)移动。
单击该链接访问参考手册:SYSLIB-RM031.PDF

离散型2、3或4态设备(P_D4SD)
P_D4SD指令控制和监视来自一个离散型2态、3态或4态设备的反馈,包括一个多速电机或多位置阀。
该指令控制多达4个离散量输出(在各种设备状态下每个输出的状态均可配置),并监视多达4个离散反馈输入。
单击该链接访问参考手册:SYSLIB-RM028.PDF
蒸汽表
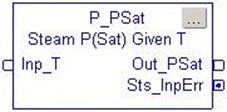
饱和蒸汽压力(P_PSat)
P_PSat指令计算给定温度(单位:摄氏度或华氏度)下饱和蒸汽的绝对压力(单位:MPa或psia)。它也提供给定温度下液体和蒸气的焓、熵和比容。
单击该链接访问参考手册:PROCES-RM004.PDF
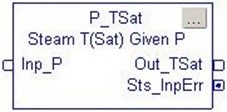
饱和蒸汽温度(P_TSat)
p_TSat指令计算给定绝对压力(单位:MPa或psia)下饱和蒸汽的温度(单位:摄氏度或华氏度)。它也提供给定压力下液体和蒸气的焓、熵和比容。
单击该链接访问参考手册:PROCES-RM004.PDF
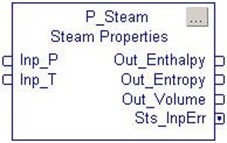
通用蒸汽表(P_Steam)
P_Steam指令计算给定压力和温度下蒸汽(水)的焓、熵和比容。
单击该链接访问参考手册:PROCES-RM004.PDF
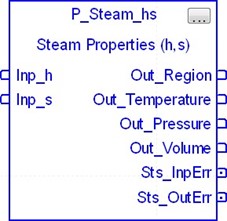
采用给定焓和熵时的蒸汽属性(P_Steam_hs)
P_Steam_hs(采用给定焓和熵时的蒸汽属性)用户自定义指令计算给定焓和熵下的压力、温度、比容(3区)以及蒸汽分率(4区)。
单击该链接访问参考手册:PROCES-RM004.PDF
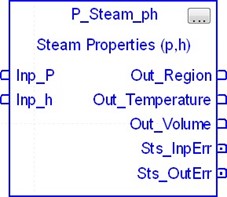
采用给定压力和焓时的蒸汽属性(P_Steam_ph)
P_Steam_ph(采用给定压力和焓时的蒸汽属性)用户自定义指令计算在给定的压力和焓下的温度和比容(3区)。
单击该链接访问参考手册:PROCES-RM004.PDF
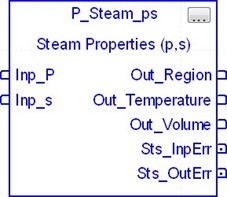
采用给定压力和熵时的蒸汽属性(P_Steam_ps)
P_Steam_ps(采用给定压力和熵时的蒸汽属性)用户自定义指令计算在给定的压力和熵下的温度和比容(3区)。
单击该链接访问参考手册:PROCES-RM004.PDF
其他功能
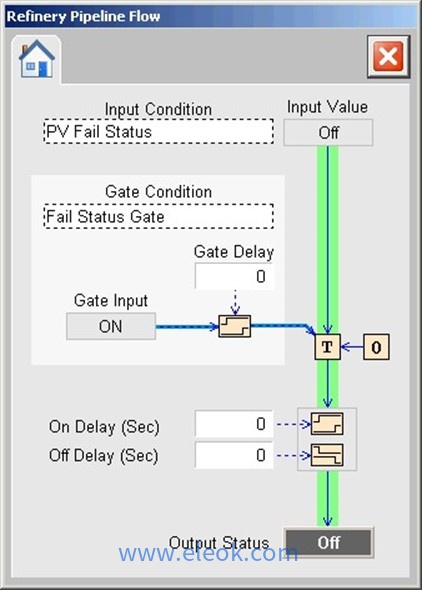
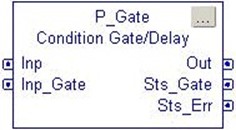
条件门延时(P_Gate)
P_Gate指令为离散信号提供一个”门”,并提供门控信号的接通延时及关断延时定时。该指令在P_DIn、所有模拟量输入以及P_PIDE内使用,用于阈值和目标不一致状态处理。当门输入为真时,通过接通延时和关断延时定时将输入传送到输出。当门输入为假时,输出保持关闭。
单击该链接访问参考手册:SYSLIB-RM041.PDF

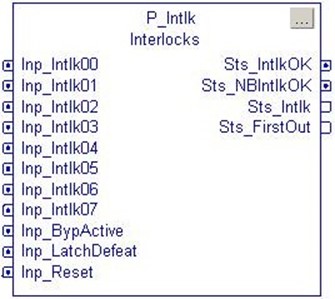
★带有首出(First Out)和旁路的连锁(P_Intlk)
P_Intlk指令用于收集(“汇总”)使正在运行或通电的设备停止或断电或防止其启动或通电的连锁条件。始终将连锁判断为设备失电条件。
如果您需要关机条件的可配置文本描述或P_Intlk操作面板的其他特性,则使用该指令。
单击该链接访问参考手册:SYSLIB-RM004.PDF


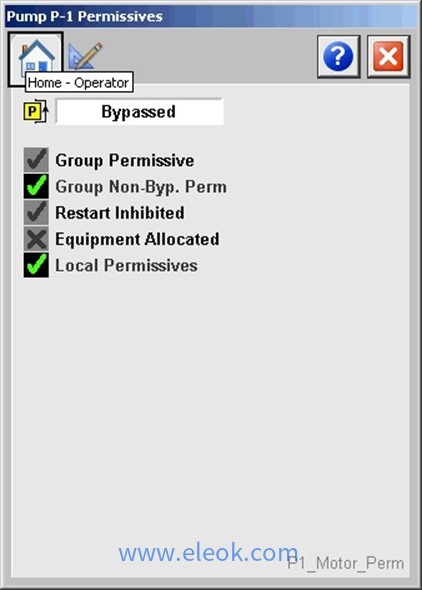
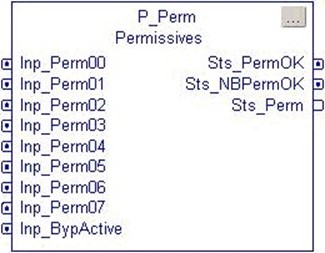
★带旁路的启动允许(P_Perm)
P_Perm指令用于收集(“汇总”)允许一台设备启动的容许条件。容许条件通常必须为真才能启动设备。一旦设备已在运行,将忽略容许条件。
单击该链接访问参考手册:SYSLIB-RM007.PDF

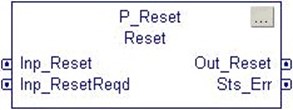
中央复位(P_Reset)
P_Reset指令提供复位设备故障和锁存控制策略报警的中心点。如果您希望对控制策略、过程设备、过程单元格或设备组、过程区域或工厂区域乃至一个小型站点的报警和故障条件使用公共复位点(主站复位),则使用该指令。
单击该链接访问参考手册:SYSLIB-RM008.PDF


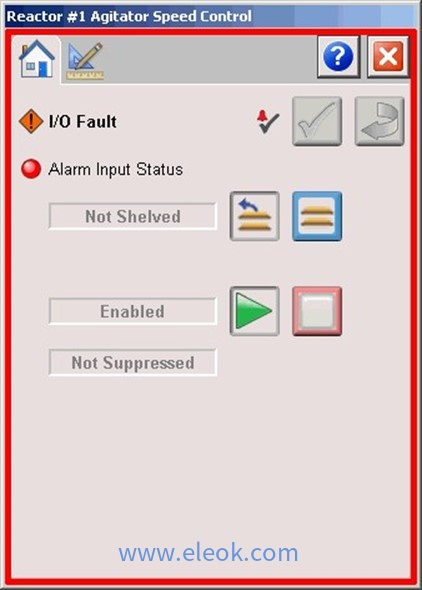
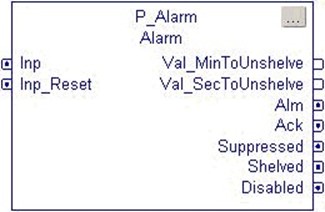
★通用的报警块(P_Alarm)
P_Alarm指令用于监视输入条件,并在条件为真时发出报警。将向操作员通知异常条件或事件。该指令处理报警确认、报警复位、报警搁置/禁用和报警抑制(用于FactoryTalk®报警和事件)。
单击该链接访问参考手册:SYSLIB-RM002.PDF

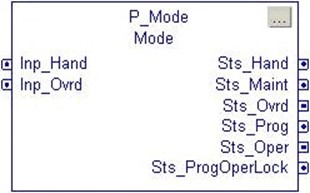
★通用的模式模块(P_Mode)
P_Mode指令用于提供指令或控制策略的模式(所有者)选择。如果您正在为一个设备创建用户自定义指令(该设备需要单独采集操作员和程序逻辑,或支持超驰或手动功能,或需要单独的维护模式),则使用该指令。
单击该链接访问参考手册:SYSLIB-RM005.PDF
![]()
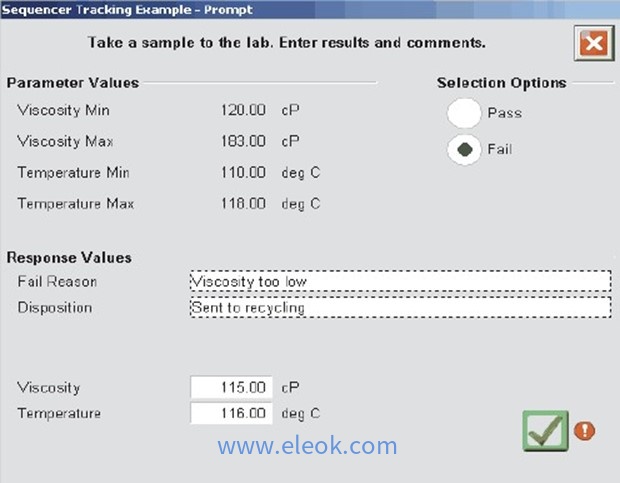
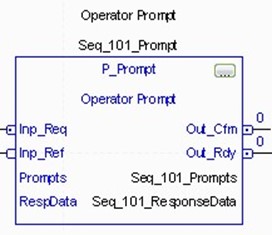
★操作员提示(P_Prompt)
P_Prompt指令是操作员交互的一种通用机制,可用于任何任务。该指令向操作员提示某些类型的信息(消息或数据),并接受操作员输入数据和确认。
单击该链接访问参考手册:SYSLIB-RM046.PDF
![]()
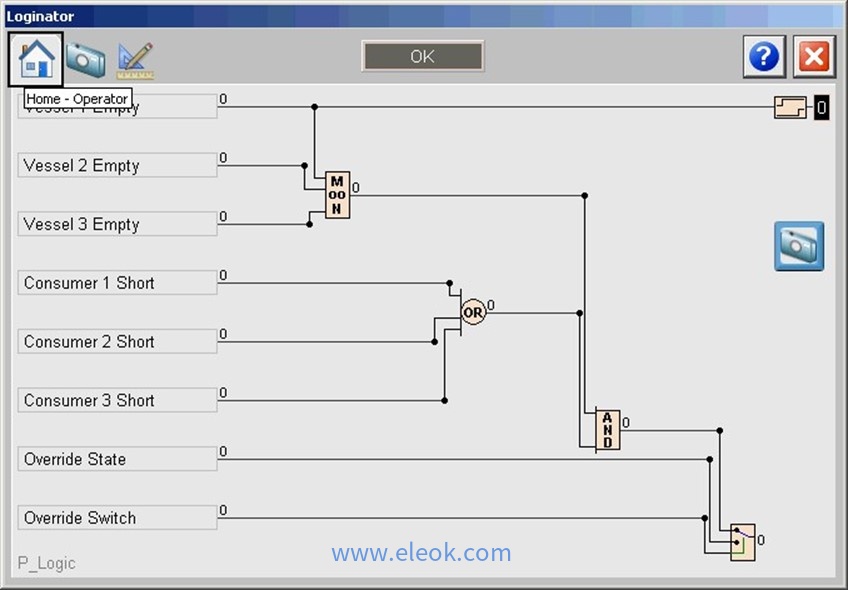
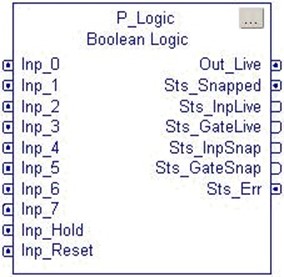
含快照的布尔逻辑(P_Logic)
P_Logic指令执行最多8个可配置布尔逻辑门。每个门最多提供4个输入条件。可用的门类型包括AND、OR、XOR(异或)、Set/Reset(置位/复位)、Select(选择)和Majority(大多数)。
单击该链接访问参考手册:SYSLIB-RM027.PDF
诊断对象
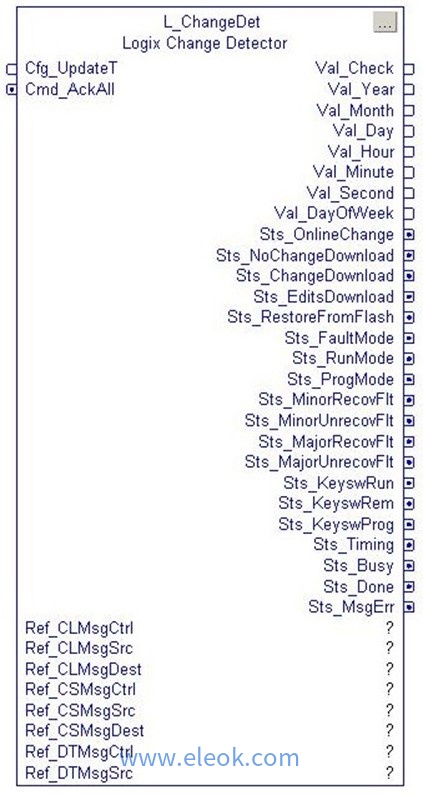
Logix更改检测器(L_ChangeDet)
L_ChangeDet指令监视网络上的另一个Logix控制器,并检查影响操作的更改。可监视的更改包括下载、在线编辑,I/O强制和控制器模式的改变。
单击该链接访问参考手册:PROCES-RM003.PDF
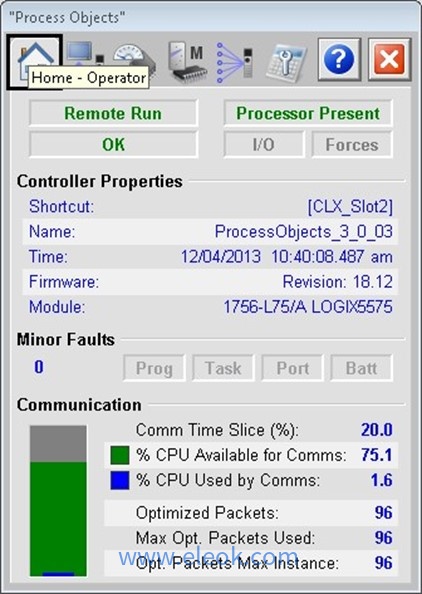
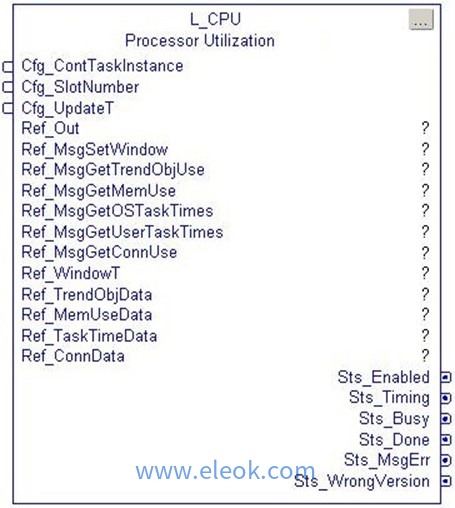
★Logix控制器CPU利用率(L_CPU)
L_CPU指令监视Logix控制器,并提供关于控制器CPU利用率、通信使用率、内存使用率、任务扫描时间及其他信息。
该指令提供的数据对诊断通信或控制响应度问题极为有用。
单击该链接访问参考手册:PROCES-RM003.PDF
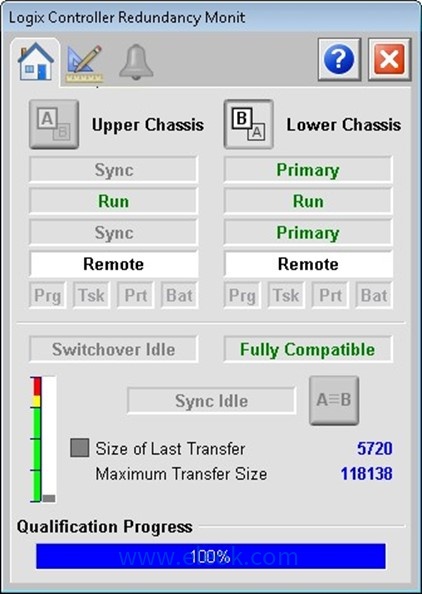
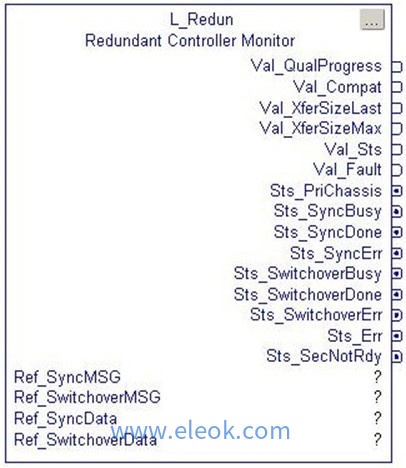
★Logix冗余控制器监视器(L_Redun)
L_Redun指令监视一对冗余Logix控制器,检查主和辅控制器状态,这些状态在主控制器发生故障时会影响系统切换到备用控制器的功能。
单击该链接访问参考手册:PROCES-RM003.PDF
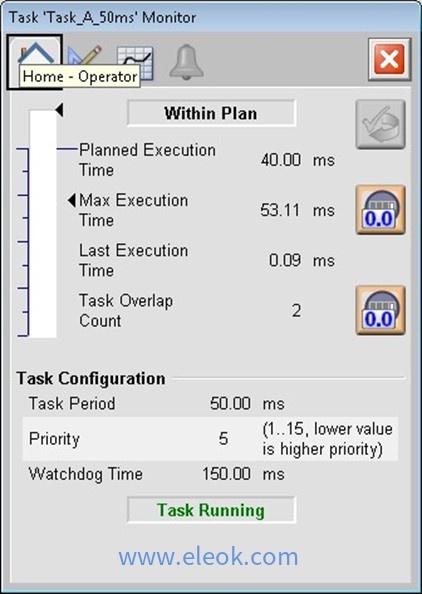
★Logix任务监视器(L_TaskMon)
L_TaskMon指令监视在Logix控制器中运行的一个任务,以提供任务统计数据,例如,任务扫描时间和重叠计数(overlap count)。该指令还提供任务配置设置以及任务”计划”执行时间,并在超出计划执行时间时发出报警。
单击该链接访问参考手册:PROCES-RM003.PDF

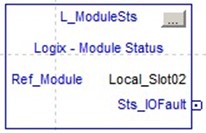
Logix模块状态(L_ModuleSts)
L_ModuleSts(Logix模块状态)用户自定义指令监视Logix控制器的I/O配置树中一个模块的连接状态。
当连接未”运行”时,该指令还提供一个I/O故障。
单击该链接访问参考手册:PROCES-RM003.PDF
版权声明:本文内容来源于网络搜集无法获知原创作者,仅供个人学习用途,若侵犯到您的权益请联系我们及时删除。邮箱:1370723259@qq.com